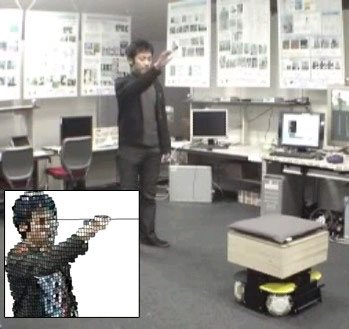
Tsuyoshi Horo, un ingeniero de la Universidad de Tokyo, desarrolló un sistema de control que permite que un robot obedezca comandos gestuales.
El secreto está en una organización circular de cámaras que registran movimiento humano en una habitación. La información obtenida produce un modelo tridimensional de las personas dentro del círculo, permitiendo un rastreo de movimientos preciso. Estos movimientos se traducen en comandos direccionales que se transmiten al robot. De esta manera, con sólo señalar un punto, tenemos a un autómata desplazándose en la dirección deseada.
El software no se limita al control de robots. Horo ya ha desarrollado prototipos de interfaces para ordenador utilizando el mismo sistema de reconstrucción de volumen humano con cámaras múltiples.

