La simulación de físicas es muy importante para que salgan buenos juegos y películas, y en un estudio reciente se consiguió crear un tipo de locomoción simulada en 3D basada en músculos flexibles para criaturas bípedas, dándoles a los modelos virtuales la posibilidad de caminar mejor aprendiendo de los errores.
La potencia del hardware actual está permitiendo empujar las fronteras de lo posible en los gráficos 3D y en la simulación de físicas realistas, que luego se transfieren a películas y videojuegos de costosas producción. La investigación en desarrollo de físicas 3D en seres vivos es tenaz y está enfocada en la mejora de la simulación de músculos y fluidez que tienen las personas o los animales en la vida real, y para esto hay que poner mucho trabajo en el estudio de los movimientos reales. Un estudio ha hecho avances interesantes en el área al crear modelos virtuales de una simulación física con músculos flexibles para que aprendan a caminar progresivamente.
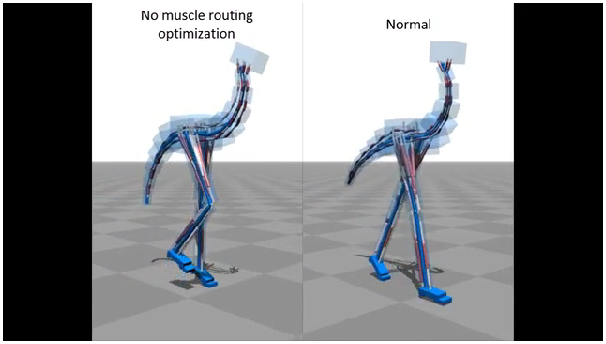
Los modelos virtuales que se ven en el vídeo tienen varios paquetes de logaritmos funcionando detrás de ellos para conseguir una simulación física lo más precisa posible de lo que son músculos flexibles, remplazando la vieja escuela de músculos y huesos rígidos que se podía conseguir en el simulacro 3D. Con motores autónomos, los muñecos virtuales se adaptan a las características de la criatura que los inspira y pueden caminar o correr con una naturalidad notable. Muy importante es que esta habilidad para caminar o correr de esa forma se consigue progresivamente, a través de un software de aprendizaje que los ayuda a adquirir lo necesario para mantener el equilibrio, caminar más fluidamente y esquivar objetos más fácilmente.

En cada generación, y según los análisis que haga el motor gráfico principal, los modelos van evolucionando y logrando mejores resultados en cuanto a su medio de locomoción. De hecho, esta evolución no sólo les hace caminar más naturalmente, sino también más eficientemente, ya que se analiza qué estilo de movimiento sirve más. El programa también incluyó pruebas con diferentes gravedades y con efectos como el rozamiento, además de aplastamientos por presión con los que se puede “jugar” para aprender más del movimiento de los músculos flexibles y a la vez enseñar a estos modelos virtuales. Esto proporciona un método de control genérico de la locomoción que soporta una variedad de criaturas bípedas que tienen limitaciones biométricas. Para más información, enlazamos el paper a continuación.


One Comment
Leave a Reply