

En situaciones de rescate, muchas veces se recurre a los robots con el objetivo de obtener datos iniciales sobre el entorno afectado, incluyendo la generación de mapas que resultan de vital ayuda para los rescatistas. Sin embargo, nunca faltan ocasiones en las que el robot se ve limitado ya sea en su movimiento o en sus funciones, por lo tanto, un equipo de investigadores en el MIT ha desarrollado un paquete portátil de sensores que le permiten a los primeros elementos humanos en un escenario determinado generar mapas en tiempo real y también transmitir vídeo.
En toda situación crítica, la falta de información es uno de los mayores enemigos a los que se deben enfrentar los expertos en rescate. Qué provocó el accidente, cuál es la cantidad de personas atrapadas, determinar la presencia de materiales peligrosos… y la lista sigue. Nunca se sabe en dónde será el siguiente accidente, y los rescatistas deben eliminar la falta de información lo antes posible. La intervención de los robots en estos acontecimientos es cada vez más amplia, y sus beneficios durante una situación de riesgo son bien conocidos. Por otro lado, hay ocasiones en las que llegan rápidamente a su límite operativo. Algo tan simple como una escalera puede detener el avance de un robot, pero hasta que no se mejore drásticamente su capacidad de movimiento, una alternativa es invertir los roles: Que el humano haga de robot.
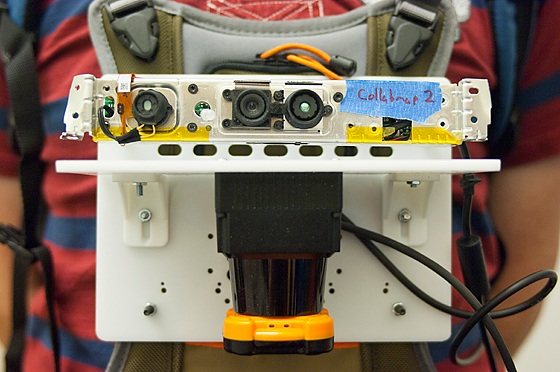
Para lograr esto, un equipo de investigadores del MIT desarrolló un paquete de sensores especiales montados sobre un soporte de plástico que se instala en el pecho del usuario. El paquete está compuesto por giroscopios, acelerómetros, una cámara y un sensor LIDAR, también mal llamado “radar láser”. A medida que el usuario avanza por la zona, los datos son transmitidos a un ordenador portátil en las cercanías, mientras que el sensor LIDAR comienza a generar un mapa del entorno. El sistema también puede recibir anotaciones del usuario a través de un dispositivo móvil, destacando diferentes secciones de un lugar con el objetivo de reportar un peligro u otra información adicional.
Una de las partes más complejas del proyecto fue compensar los errores registrados por el sensor LIDAR mientras el usuario está en movimiento. Al contrario de la estabilidad general que puede proveer un robot, un rescatista tal vez sea vea forzado a trepar, agacharse o realizar otra clase de movimientos que podrían dejar de cabeza al sensor. En el futuro, los ingenieros planean agregar capacidad de registro de voz, con la idea de brindar al usuario la posibilidad de realizar reportes verbales, y también dejar “notas de audio” en el camino a medida que va avanzando.
