

No. No está diseñado para hacer un enorme agujero que traspase la Luna. El “Polaris”, un prototipo de robot desarrollado por la Astrobotic Technology Inc., un spin-off de la Carnegie Mellon University, tiene como misión perforar la superficie de la Luna con su taladro de más de tres metros de largo para buscar agua. Será capaz de hacer múltiples excavaciones en el suelo lunar y los responsables del proyecto esperan -una vez que Polaris esté listo y probado- enviarlo a nuestro satélite mediante un cohete Falcon 9 de SpaceX.
Los ojos de los científicos están en este momento posados sobre Marte. Las últimas misiones de la NASA nos han mostrado el planeta rojo como nunca lo habíamos visto, y su éxito ha impulsado un gran número de proyectos relacionados con ese planeta. En estos días parece que la Luna ha pasado a un segundo plano, opacada por el protagonismo que ha adquirido Marte. Sin embargo, la Luna es la Luna y siempre tendrá interés para la humanidad, ya que tiene el potencial de convertirse en el sitio de asentamiento de la primera colonia humana fuera de nuestro planeta. Una de las cuestiones que necesitamos resolver antes de planificar un hábitat lunar es la existencia de agua y oxígeno, ya que si bien algunas misiones recientes de la NASA y la Agencia Espacial India sugieren que una cantidad considerable de hielo de agua podría existir en sus polos, lo cierto es que nunca hemos enviado algo parecido al Curiosity a la Luna. Si queremos establecernos en ella, necesitamos asegurarnos de que existen allí fuentes potenciales de agua, combustible y oxígeno.
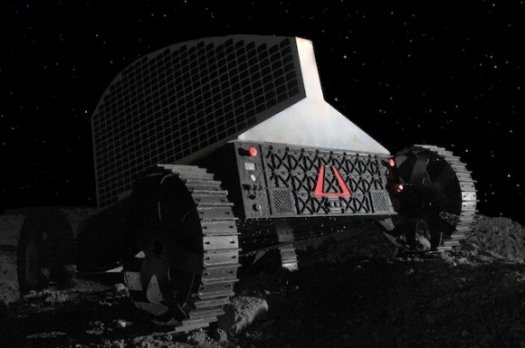
Astrobotic Technology Inc., un spin-off de la Carnegie Mellon University, ha presentado el prototipo de robot lunar de prospección llamado Polaris. Se trata de un “rover” diseñado específicamente para buscar agua en la Luna, y para ello cuenta con taladro de más de 3 metros de largo. Sus creadores afirman que esta herramienta les permitirá perforar la superficie de la nuestro satélite en busca del hielo que se cree puede encontrarse en las regiones que permanecen la mayor parte del tiempo a la sombra. Polaris es el primer robot de este tipo, ya que aunque antes se han desarrollado robots destinados a la prospección, ninguno fue diseñado desde cero para operar en la Luna. El artefacto mide unos ocho metros de largo, siete de ancho y tiene una altura máxima superior a los cinco metros. Pesa unos 150 kilogramos y puede transportar hasta 80 kilogramos de equipos. Dado su tamaño, el peso total de este robot parece escaso, pero puede deberse a que buena parte de su volumen proviene de una “cresta” de paneles solares que posee en su parte superior, destinada a proveerlo de energía.
El el día lunar dura unos 14 días terrestres, y la autonomía de este robot le permitiría trabajar durante unos 10 días. El equipo de desarrollo cree que el robot puede realizar entre 10 y 100 perforaciones en ese lapso de tiempo (depende de la dureza local del suelo) y que -si consigue sobrevivir a la noche lunar, recargar las baterías en cada amanecer para operar durante varios meses. Se espera que el robot sea capaz de desplazarse unos cinco kilómetros durante su búsqueda de agua, en una región cercana al polo norte de la Luna. Una vez que las pruebas realizadas a este prototipo hayan demostrado su efectividad, se lo enviaría a la Luna mediante un cohete Falcon 9 de SpaceX. Aún no se ha estimado la fecha en que esto tendrá lugar, pero se sabe que la NASA ha colaborado con este proyecto con contratos valorados unos 3.6 millones de dólares.
