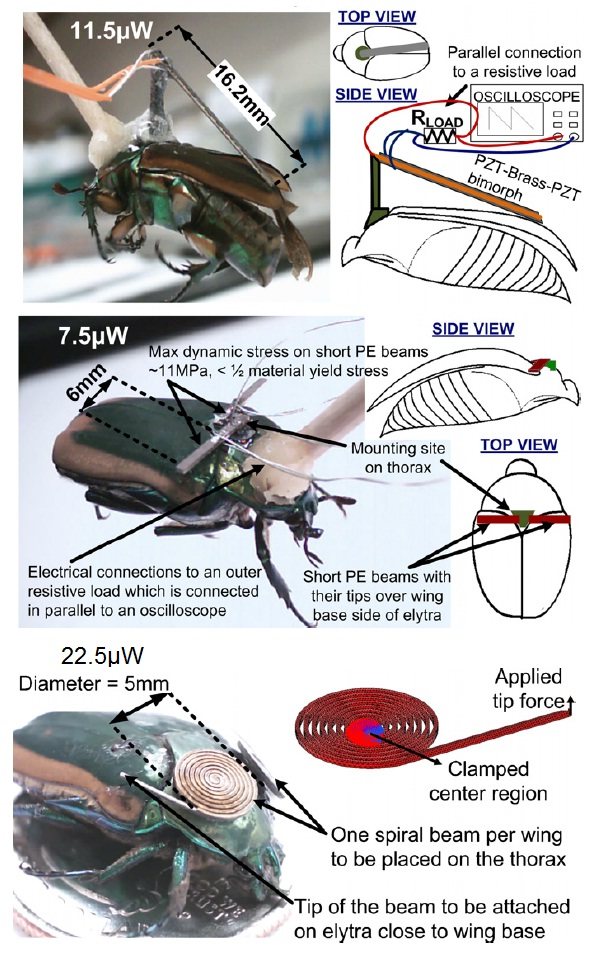
Durante años los investigadores han trabajado en el diseño y construcción de los denominados micro-vehículos aéreos (MAV), pequeños robots voladores del tamaño de un insecto. Pero algunos investigadores, después de darse cuenta de que resulta extraordinariamente difícil fabricar un vehículo volador pequeño y ligero, que además sea capaz de transportar una carga útil y que disponga de una autonomía razonable, han abandonado los planes de copiar la naturaleza para intentar utilizar directamente insectos vivos. Utilizando pequeños estimuladores en sus antenas y electrodos implantados en sus sistema nerviosos para controlarlos, los científicos del equipo de Erkan Aktakka han descubierto además que es posible obtener electricidad a partir del movimiento de las alas, con la que se puede alimentar el sistema encargado de controlar el cerebro -y por lo tanto el vuelo- de algunos insectos. Se trata de un trabajo que nos pone en la linea de largada de lo que será la primer generación de “insectos cyborg”. “Durante la última década hemos sido testigos de un tremendo y emocionante esfuerzo dirigido al desarrollo de micro-vehículos aéreos (MAV)” dice Ethem Erkan Aktakka, de la Universidad de Michigan. “Pero hemos descubierto que un insecto cyborg resulta más ventajoso en lo que respecta a la aerodinámica, la autonomía de vuelo, la capacidad de carga y el almacenamiento de energía.” Con estas palabras, el investigador reconoce que la tecnología actual no es capaz de imitar correctamente el trabajo de la naturaleza a la hora de fabricar un MAV (micro-air-vehicle) a escala real. Los circuitos electrónicos probablemente estén a la altura de lo que se espera de ellos, ya que su tamaño, peso, capacidad de cálculo y consumo eléctrico han mejorado cada año durante las últimas décadas. Pero los actuadores, motores y baterías que se necesitan para mantener en el aire a uno de estos micro robots siguen siendo muy pesados, grandes e inconvenientes. Aunque como dice Aktakka, “para que copiar algo que ya tenemos a nuestro alcance”. Un escarabajo es capaz de producir un total de 45 mW de potencia. La idea es relativamente simple, aunque como suele ocurrir en estos casos, bastante difícil de llevar a cabo. En lugar de construir un robot pequeño se puede controlar el comportamiento de un insecto vivo, como un escarabajo, para que realice los trabajos que su controlador le ordena. Millones de años de evolución han hecho de estos pequeños seres vivos maquinas maravillosas, sumamente eficientes en el consumo de energía y altamente especializados en la resolución de los problemas relacionados con el vuelo. No estamos diciendo que los insectos sean capaces de realizar grandes hazañas intelectuales, pero saben como evitar un obstáculo o dirigirse desde el punto “A” al punto “B”. Con esta idea en mente, Aktakka y sus colegas Hanseup Kim y Khalil Najafi de la Universidad de Michigan, desarrollaron un dispositivo capaz de obtener energía eléctrica a partir del movimiento de las alas de un “escarabajo verde de junio” (Cotinis mutabilis). Con dos de estos generadores “instalados” en su cuerpo, uno debajo de cada ala, el escarabajo es capaz de producir un total de 45 mW de potencia. Con esa energía los investigadores pueden alimentar la electrónica y los actuadores que se encargarán de dirigir el vuelo del insecto. Y recien están empezado: posiblemente sean capaces de multiplicar por 10 el rendimiento de estos dispositivos, mediante la conexión directa entre ellos y los músculos del insecto. El estudio realizado por estos científicos acaba de ser publicado en la última edición del Journal of Micromechanics and Microengineering, y hasta donde sabemos, se trata del primer intento serio de recoger energía de insectos vivos mediante dispositivos no resonantes. En algunos intentos anteriores se emplearon termopares (que aprovechan el calor corporal de los seres vivos) o dispositivos de resonancia magnética. En el futuro, esa energía se almacenará en un pequeño ultracapacitor instalado en el lomo del insecto, junto al resto de la electrónica de control, de forma que el sistema de control funcione aún cuando el huesped se encuentre reposando. En cuanto al sistema de control, ya se ha trabajado en este tipo de interfaz, utilizando como sujetos de prueba a polillas o cucarachas. DARPA, como no puede ser de otra manera, ha financiado este proyecto dentro del marco de su DARPA Hybrid Insect MEMS program. La Agencia de Investigación de Proyectos Avanzados de Defensa de los Estados Unidos siempre está interesada en cualquier proyecto innovador que pueda tener alguna aplicación relacionada con la defensa (y el ataque, ya que estamos), y este parece tener todos los ingredientes necesarios como para recibir algunos dólares provenientes de las arcas del Tio Sam.