

Desde que Kinect está abierto al uso público, mediante un controlador con posibilidades infinitas, estamos viendo todo tipo de proyectos que utilizan el nuevo periférico de Microsoft. Sin embargo, los proyectos más interesantes que vimos hasta ahora están relacionados a la robótica. Como los muchachos de Willow Garage, creadores del robot PR2. Además de mejorar el controlador e integrarle las librerías y herramientas de ROS, el sistema operativo de robots de código abierto, están trabajando en un sistema para controlar un robot utilizando Kinect.
Era de esperarse que ni bien alguien hackee el nuevo periférico de Microsoft, iba a haber un montón de proyectos locos e interesantes en la web. Ahora con el controlador ya libre en la web, podemos ver cosas como estas: una persona controlando un robot a través de Kinect. Para lograrlo utilizaron ROS (Robot Operating System), el sistema operativo de código abierto que cualquiera puede usar en su robot y adaptaron el sistema para funcionar con el novedoso periférico.
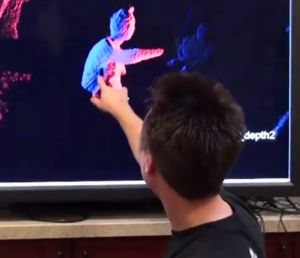
El equipo Willow Garage está llevando a cabo este proyecto donde utilizaron dos Kinect para crear un mapa tridimensional de una persona. Algo similar a lo que hizo Oliver Kreylos, pero al utilizar dos dispositivos, les permitió llenar todo esos espacios que un solo periférico no podía ver. De esta manera, pueden detectar todos los movimientos de la persona en un espacio virtual. El resultado, como se puede ver en el vídeo, fue poder mover los brazos del robot PR2, sin la necesidad de algún control.
PR2 es un robot que se encuentra a la venta actualmente, desarrollado enteramente por el equipo en Willow Garage con el objetivo de estudiar interfaces humano/robot. Hasta llegaron a programarlo para que vaya a buscar cervezas a la nevera. Sin embargo ahora es una pieza clave de esta nueva investigación que, según explican, todavía tiene para algunos meses, mientras intentan mejorar lo que tienen y alcanzar un punto donde puedan usar Kinect para controlar al robot en su totalidad. Actualmente se encuentran mejorando el controlador de Kinect, como la calibración e integrarle las librerías y herramientas de ROS.
Este y algunos otros que hemos visto en el pasado demuestran el potencial de Kinect como mucho más que un periférico para la Xbox 360. Si este tipo de innovaciones sigue al mismo paso, recordaremos a Kinect como el dispositivo que le dio a los desarrolladores independientes las herramientas para alcanzar sus objetivos, más que un periférico con el que se podía jugar juegos sin la necesidad de un controlador. Esto ocurre porque en comparación a lo que saldrían cámaras de buena calidad que les permitan hacer esto, Kinect es mucho más económico.
