Hubo una época en la que generar un «mapa 3D» de nuestro entorno era algo casi prohibitivo. Sin embargo, la llegada del Microsoft Kinect abrió la puerta a cientos de proyectos, y desde entonces los entusiastas del DIY no se han detenido. Uno de ellos es Frank Zhao, quien decidió seguir la vía portátil al combinar un Raspberry Pi 4 con una cámara Intel RealSense D415, y una carcasa impresa en 3D. También se encargó de preparar el software, y simplificar el proceso de instalación.
Más allá de sus limitaciones naturales y los problemas de disponibilidad en algunas regiones, nadie puede negar que el Raspberry Pi revolucionó al espacio DIY. Muchas ideas que antes demandaban hardware dedicado ahora llegan a buen puerto con uno de estos mini ordenadores dentro de la ecuación, y el aumento del rendimiento con cada nueva generación multiplica su potencial. De hecho, la aparición del Raspberry Pi 4 fue fundamental para los planes de Frank Zhao.
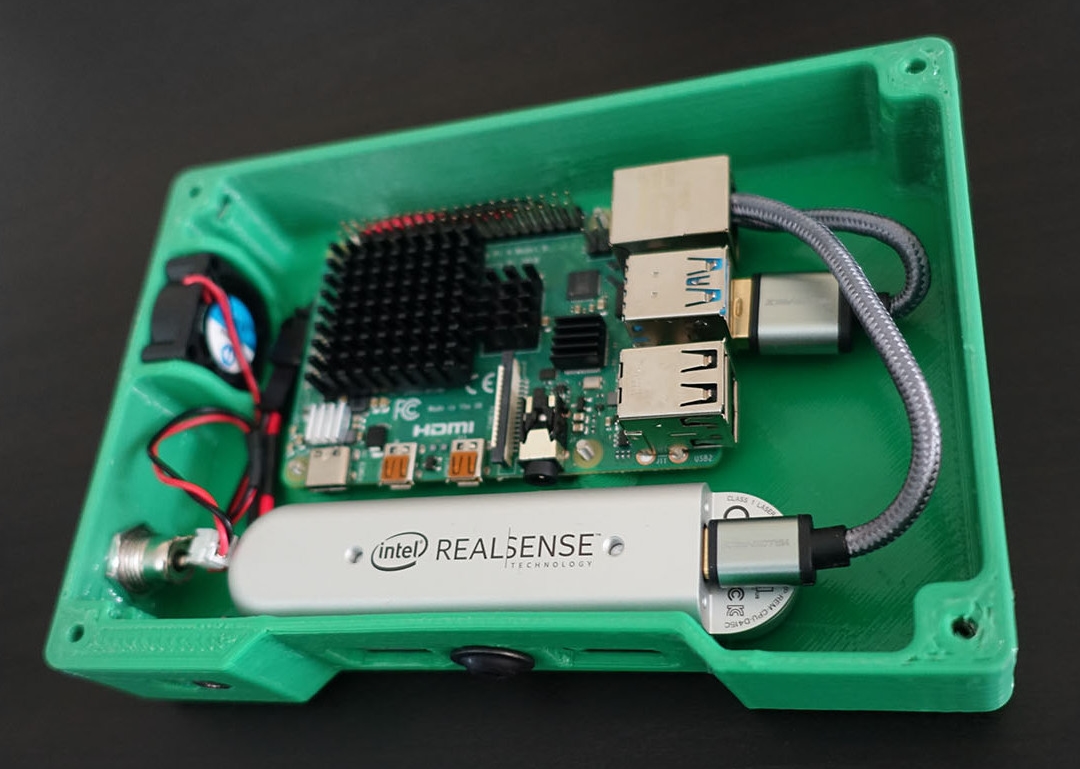
Después de haber explorado las virtudes de la fotogrametría, Frank decidió avanzar con la posibilidad de crear una solución portátil para escanear entornos en 3D. En esencia, el uso de un SoC más robusto y la disponibilidad de dos puertos USB 3.0 le dan la potencia suficiente para procesar las señales de una cámara de profundidad Intel RealSense D415, que combina cámaras infrarrojas estereoscópicas, una cámara RGB, y un procesador interno.
La parte del software queda a cargo de RTAB-Map (instalado sobre Raspbian Buster), que por lo general es utilizado en aplicaciones de robótica, de modo tal que el robot pueda realizar SLAM (Simultaneous Location And Mapping) creando un mapa 3D en su entorno «y» localizarse a sí mismo en él. Frank explica que con la intervención de RTAB-Map, el usuario puede colocar una nube de puntos de un objeto en espacio 3D gracias a la cámara de profundidad, y el rastreo tanto de sus coordenadas como de su orientación en 3D.
¿La mejor parte? No hay que soldar ni hackear nada, más allá de la impresión 3D de una carcasa para recibir a todos los dispositivos. La instalación de software es bastante compleja si alguien decide comenzar desde cero, pero Frank compartió un script en GitHub que apunta a simplificar drásticamente el proceso, siempre y cuando no nos desviemos de sus requerimientos básicos (o sea, un RPi 4 con Raspbian Buster). ¿Tienes un Raspberry Pi 4 y algunos euros para invertir en este proyecto? ¡Haz la prueba!
Sitio oficial: Haz clic aquí
Fuente: Hackaday
